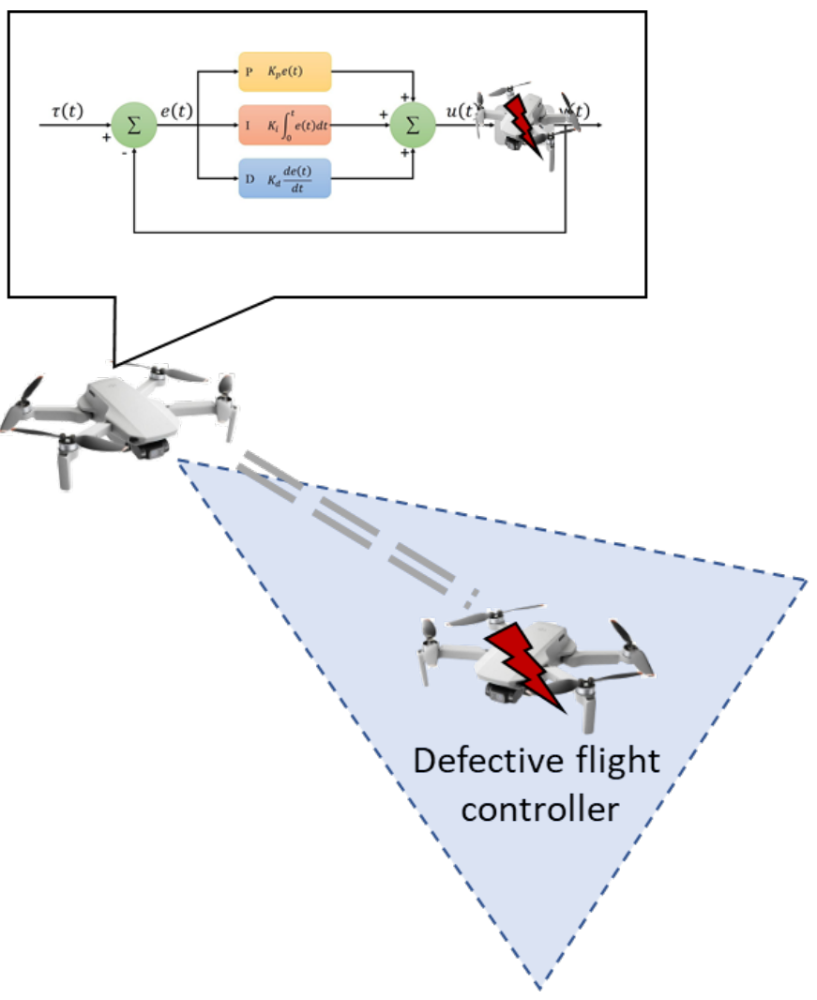
In his master's thesis, Mr Chitoshi Tamaoki showed that it is possible to reconfigure dynamically between two vehicles using the Plug&Fly method function. He integrated the PAFA framework on two multicopters and automatically migrated a waypoint list to a second multicopter during runtime in the event of an error. His experiment shows how a waypoint-based autopilot automatically switches to a second drone as soon as the first is no longer able to perform the function itself. Drone 1 is then autopiloted by drone 2. He demonstrated this in a flight test.
Mr Tamaoki was also the first Master's student at the Institute of Aerospace Systems ILS to carry out his Master's thesis together with Penn State University. For this thesis, Mr Tamaoki worked for six months in the group of Prof Thanakorn Kamavilai and Prof Eric Johnson and integrated the ILS algorithms on the drones there.